Loading...
Searching...
No Matches
collisionSystemOptimizationDynamic.h File Reference
#include "Engine/Components/collider.h"#include "Engine/Components/collisionSystemData.h"#include "Engine/Components/transform.h"#include "Engine/Entity/entity.h"#include "Engine/Systems/collisionSystem.h"#include "glm/ext/vector_float3.hpp"#include <functional>#include "collisionSystemOptimizationDynamic.inl"
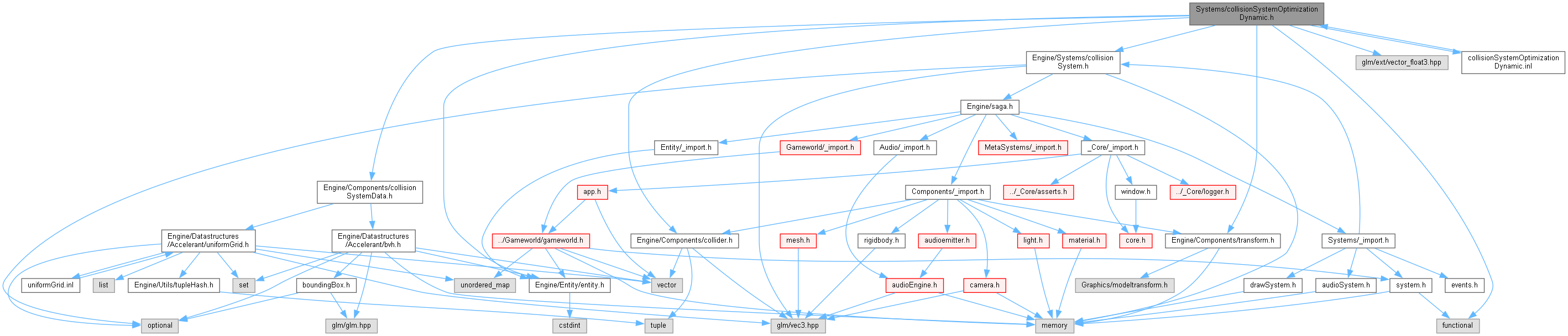
Include dependency graph for collisionSystemOptimizationDynamic.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | Saga |
| namespace | Saga::Systems |
Functions | |
| void | Saga::Systems::runOverGridCells (CollisionSystemData &collisionSystemData, glm::vec3 pos, glm::vec3 size, std::function< void(Entity)> callback) |
| Calls a function over the grid cells of a uniform grid that includes a certain bounding box. | |
| void | Saga::Systems::addToUniformGrid (CollisionSystemData &collisionSystemData, Entity entity, CylinderCollider &cylinderCollider, Transform &transform) |
| Add an entity to the uniform grid. Here, the entity must contain a cylinder collider and transform, and we add this entity to any grid cell that the cylinder specified by the collider and transform intersects. | |
| void | Saga::Systems::removeFromUniformGrid (CollisionSystemData &collisionSystemData, Entity entity, CylinderCollider &cylinderCollider, Transform &transform) |
| Remove an entity from the uniform grid. Here, the entity must contain a cylinder collider and transform, and we add this entity to any grid cell that the cylinder specified by the collider and transform intersects. | |
| void | Saga::Systems::rebuildUniformGrid (std::shared_ptr< GameWorld > world) |
| Build a world's uniform grid from all objects with cylinder colliders. | |
| std::optional< Collision > | Saga::Systems::getClosestCollisionDynamic (std::shared_ptr< GameWorld > world, std::optional< CollisionSystemData * > systemData, Entity entity, CylinderCollider &cylinderCollider, glm::vec3 pos, glm::vec3 dir) |
| Retrieve the closest dynamic collision to a cylinder. | |
Variables | |
| const glm::vec3 | Saga::Systems::gridSize = glm::vec3(3,3,3) |